
1. પરિપત્ર વણાટ મશીન તકનીકનો પરિચય
1. પરિપત્ર વણાટ મશીનનો સંક્ષિપ્ત પરિચય
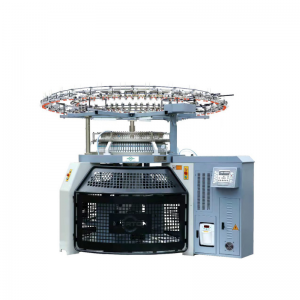
પરિપત્ર વણાટ વણાટ મશીન (આકૃતિ 1 માં બતાવ્યા પ્રમાણે) એ એક ઉપકરણ છે જે સુતરાઉ યાર્નને નળીઓવાળું કાપડમાં વણાવે છે. તેનો ઉપયોગ મુખ્યત્વે ઉભા કરેલા ગૂંથેલા કાપડ, ટી-શર્ટ કાપડ, છિદ્રોવાળા વિવિધ પેટર્નવાળા કાપડ વગેરેને ગૂંથવા માટે થાય છે. બંધારણ અનુસાર, તેને સિંગલ જર્સી પરિપત્ર વણાટ મશીન અને ડબલ જર્સી પરિપત્ર વણાટ મશીનમાં વહેંચી શકાય છે, જેનો ઉપયોગ કાપડ ઉદ્યોગમાં વ્યાપકપણે થાય છે.
 2. પ્રક્રિયા આવશ્યકતાઓ
2. પ્રક્રિયા આવશ્યકતાઓ
(1) ઇન્વર્ટર પાસે મજબૂત પર્યાવરણીય પ્રતિકાર હોવું જરૂરી છે, કારણ કે સ્થળ પર કાર્યકારી વાતાવરણનું તાપમાન પ્રમાણમાં high ંચું છે, અને સુતરાઉ ool ન સરળતાથી ઠંડકના ચાહકને સ્ટોલ અને નુકસાન પહોંચાડે છે, અને ઠંડકના છિદ્રોને અવરોધિત કરી શકે છે.
(2) લવચીક ઇંચિંગ ઓપરેશન ફંક્શન જરૂરી છે. ઇંચિંગ બટનો સાધનોના ઘણા સ્થળોએ ઇન્સ્ટોલ કરેલા છે, અને ઇન્વર્ટર ઝડપથી જવાબ આપવા માટે જરૂરી છે.
()) સ્પીડ કંટ્રોલમાં ત્રણ ગતિ જરૂરી છે. એક ઇંચિંગ operation પરેશન સ્પીડ છે, સામાન્ય રીતે 6 હર્ટ્ઝની આસપાસ; બીજો સામાન્ય વણાટની ગતિ છે, જેમાં 70 હર્ટ્ઝ સુધીની સૌથી વધુ આવર્તન છે; ત્રીજું નીચા-સ્પીડ એકત્રીકરણ કામગીરી છે, જેને લગભગ 20 હર્ટ્ઝની આવર્તનની જરૂર છે.
()) પરિપત્ર વણાટ મશીનનાં સંચાલન દરમિયાન, મોટર રિવર્સલ અને પરિભ્રમણ સંપૂર્ણપણે પ્રતિબંધિત છે, નહીં તો સોયના પલંગની સોય વળાંક અથવા તૂટી જશે. જો પરિપત્ર વણાટ મશીન સિંગલ-ફેઝ બેરિંગનો ઉપયોગ કરે છે, તો આ ધ્યાનમાં લેવામાં આવશે નહીં. જો સિસ્ટમ આગળ ફરે છે અને તેને વિરુદ્ધ કરે છે, તો તે મોટરના આગળના અને વિપરીત પરિભ્રમણ પર સંપૂર્ણપણે આધાર રાખે છે. એક તરફ, તેને વિપરીત પરિભ્રમણ પર પ્રતિબંધ મૂકવાની જરૂર છે, અને બીજી બાજુ, પરિભ્રમણને દૂર કરવા માટે તેને ડીસી બ્રેકિંગ સેટ કરવાની જરૂર છે.
3. પ્રભાવ આવશ્યકતાઓ
વણાટ કરતી વખતે, ભાર ભારે હોય છે, અને ઇંચિંગ/પ્રારંભિક પ્રક્રિયા ઝડપી થવાની જરૂર છે, જેમાં ઇન્વર્ટરને ઓછી આવર્તન, મોટી ટોર્ક અને ઝડપી પ્રતિસાદની ગતિ હોવી જરૂરી છે. આવર્તન કન્વર્ટર મોટરની ગતિ સ્થિરતા ચોકસાઈ અને ઓછી-આવર્તન ટોર્ક આઉટપુટને સુધારવા માટે વેક્ટર કંટ્રોલ મોડને અપનાવે છે.
4. નિયંત્રણ વાયરિંગ
પરિપત્ર વણાટ વણાટ મશીનનો નિયંત્રણ ભાગ માઇક્રોકન્ટ્રોલર અથવા પીએલસી + હ્યુમન-મશીન ઇન્ટરફેસ નિયંત્રણ અપનાવે છે. આવર્તન કન્વર્ટર શરૂ કરવા અને બંધ કરવા માટે ટર્મિનલ્સ દ્વારા નિયંત્રિત થાય છે, અને આવર્તન એનાલોગ જથ્થા અથવા મલ્ટિ-સ્ટેજ ફ્રીક્વન્સી સેટિંગ દ્વારા આપવામાં આવે છે.
મલ્ટિ-સ્પીડ નિયંત્રણ માટે મૂળભૂત રીતે બે નિયંત્રણ યોજનાઓ છે. એક આવર્તન સેટ કરવા માટે એનાલોગનો ઉપયોગ કરવો છે. પછી ભલે તે જોગિંગ હોય અથવા હાઇ-સ્પીડ અને લો-સ્પીડ operation પરેશન, એનાલોગ સિગ્નલ અને operating પરેટિંગ સૂચનાઓ નિયંત્રણ સિસ્ટમ દ્વારા આપવામાં આવે છે; બીજો આવર્તન કન્વર્ટરનો ઉપયોગ કરવો છે. બિલ્ટ-ઇન મલ્ટિ-સ્ટેજ ફ્રીક્વન્સી સેટિંગ, કંટ્રોલ સિસ્ટમ મલ્ટિ-સ્ટેજ ફ્રીક્વન્સી સ્વિચિંગ સિગ્નલ આપે છે, જોગ ઇન્વર્ટર દ્વારા જ પ્રદાન કરવામાં આવે છે, અને હાઇ-સ્પીડ વણાટની આવર્તન એનાલોગ જથ્થા અથવા ઇન્વર્ટરના ડિજિટલ સેટિંગ દ્વારા આપવામાં આવે છે.
2. સાઇટ પર આવશ્યકતાઓ અને કમિશનિંગ પ્લાન
(1) સ્થળની આવશ્યકતાઓ
પરિપત્ર વણાટ મશીન ઉદ્યોગમાં ઇન્વર્ટરના નિયંત્રણ કાર્ય માટે પ્રમાણમાં સરળ આવશ્યકતાઓ છે. સામાન્ય રીતે, તે પ્રારંભ અને બંધને નિયંત્રિત કરવા માટે ટર્મિનલ્સ સાથે જોડાયેલ છે, એનાલોગ આવર્તન આપવામાં આવે છે, અથવા આવર્તન સેટ કરવા માટે મલ્ટિ-સ્પીડનો ઉપયોગ થાય છે. ઇંચિંગ અથવા લો-સ્પીડ operation પરેશન ઝડપી હોવું જરૂરી છે, તેથી ઓછી આવર્તન પર મોટી ઓછી-આવર્તન ટોર્ક ઉત્પન્ન કરવા માટે મોટરને નિયંત્રિત કરવા માટે ઇન્વર્ટર આવશ્યક છે. સામાન્ય રીતે, પરિપત્ર વણાટ મશીનોની એપ્લિકેશનમાં, આવર્તન કન્વર્ટરનો વી/એફ મોડ પૂરતો છે.
(૨) ડિબગીંગ સ્કીમ અમે જે યોજના અપનાવીએ છીએ તે છે: સી 320 સિરીઝ સેન્સરલેસ વર્તમાન વેક્ટર ઇન્વર્ટર પાવર: 7.7 અને 5.5 કેડબલ્યુ
3. ડિબગીંગ પરિમાણો અને સૂચનાઓ
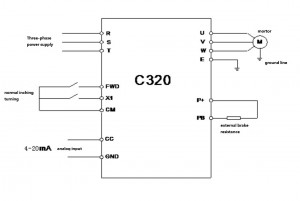
1. વાયરિંગ ડાયાગ્રામ
2. ડિબગ પરિમાણ સેટિંગ
(1) F0.0 = 0 VF મોડ
(2) f0.1 = 6 આવર્તન ઇનપુટ ચેનલ બાહ્ય વર્તમાન સિગ્નલ
(3) f0.4 = 0001 બાહ્ય ટર્મિનલ નિયંત્રણ
(4) f0.6 = 0010 રિવર્સ રોટેશન નિવારણ માન્ય છે
(5) f0.10 = 5 પ્રવેગક સમય 5s
(6) f0.11 = 0.8 ડિસેલેશન સમય 0.8s
(7) f0.16 = 6 કેરીઅર ફ્રીક્વન્સી 6 કે
(8) એફ 1.1 = 4 ટોર્ક બૂસ્ટ 4
(9) F3.0 = 6 આગળ જોગ માટે x1 સેટ કરો
(10) F4.10 = 6 જોગ આવર્તનને 6 હર્ટ્ઝ પર સેટ કરો
(11) F4.21 = 3.5 જોગ પ્રવેગક સમયને 3.5s પર સેટ કરો
(12) F4.22 = 1.5 જોગ ડિસેલેરેશન સમયને 1.5 એસ પર સેટ કરે છે
ડીબગીંગ નોંધ
(1) પ્રથમ, મોટરની દિશા નક્કી કરવા માટે જોગ.
(૨) જોગિંગ દરમિયાન કંપન અને ધીમી પ્રતિક્રિયાની સમસ્યાઓ અંગે, જોગિંગના પ્રવેગક અને ડિસેલેરેશન સમયને આવશ્યકતાઓ અનુસાર ગોઠવવાની જરૂર છે.
()) વાહક તરંગ અને ટોર્ક બૂસ્ટને સમાયોજિત કરીને ઓછી-આવર્તન ટોર્ક સુધારી શકાય છે.
()) સુતરાઉ ool ન હવાના નળી અને ચાહક સ્ટોલ્સને અવરોધે છે, જેના કારણે ઇન્વર્ટરના નબળા ગરમીનું વિસર્જન થાય છે. આ પરિસ્થિતિ વારંવાર થાય છે. હાલમાં, સામાન્ય ઇન્વર્ટર થર્મલ એલાર્મ છોડી દે છે અને પછી તેનો ઉપયોગ ચાલુ રાખતા પહેલા જાતે જ હવાના નળીમાં લિન્ટને દૂર કરે છે.
પોસ્ટ સમય: સપ્ટે -08-2023